
Na jaren sleutelen hebben de robotici van het ETH Zürich hun wandelende robot ANYmal toch wieltjes gegeven. Zo moet hij kunnen lopen én rijden.
Toegegeven: op ruig terrein zijn wielen niet handig. Liever ga je te voet, dan kom je nog ergens. Maar ja, op vlak terrein zijn wielen wél weer heel prettig. Dat scheelt flink energie. In de hoop het beste van beide werelden te combineren, rustten de knappe koppen van het Robotics Systems Lab van de ETH Zürich, hun robothond ANYmal uit met afzonderlijk aangedreven wieltjes. Daarmee kan hij lopen én rijden. Althans, dat is uiteindelijk de bedoeling.
Lees ook: Spot krijgt concurrentie van ANYmal C
Aan de wandel
ANYmal, het Zwitserse broertje van Boston Dynamics’ Spot, gaat al even mee. De robothond kan op afstand door mensen bestuurd worden, maar is dankzij ingebouwde lasersensors en verschillende camera’s, ook heel goed in staat er op eigen houtje op uit te gaan.
Eerder zagen we hoe de androïde hond zich met gemak over ruig terrein manoeuvreert en ook trappen niet uit de weg gaat (nou ja, meestal). De vier poten van ANYmal komen hierbij goed van pas. Toch laten ze op vlak terrein nog iets te wensen over. Met wieltjes zou de robothond zich daar veel sneller kunnen verplaatsen. Bovendien vergt het een stuk minder waardevolle energie.
De tekst gaat verder onder de foto’s.
Beste van beide werelden
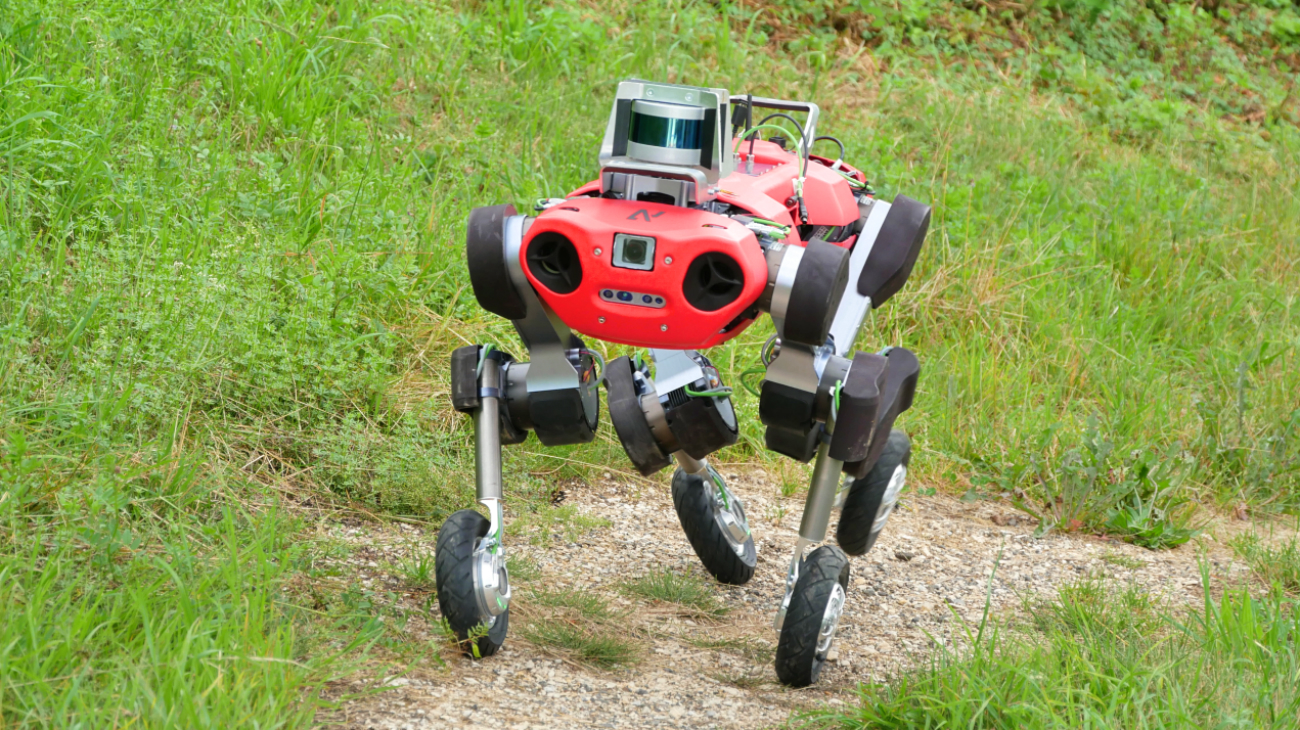
En dus voorzag het team achter ANYmal de nieuwste versie van wielen. Daarmee kan de androïde hond met een snelheid tot 4 meter per seconde over vlakke stukken crossen. En geen zorgen, terug bij af zijn de makers hiermee niet. De wielen, bevestigd aan het uiteinde van elke ‘poot’, zijn namelijk afzonderlijk van elkaar aan te sturen.
Om alleen te lopen, kunnen alle wieltjes tegelijkertijd geremd worden. Het rubber van de banden geeft grip. Maar combinaties van remmen, rijden – snel of langzaam – kunnen natuurlijk ook. Net wat de robothond nodig heeft.
Het doel is uiteindelijk natuurlijk de perfecte balans te vinden tussen lopen (en klimmen) en rijden. Helemaal soepeltjes gaat het ANYmal nog niet af. Gelukkig baart oefening kunst. Laten we vooral niet vergeten dat Boston Dynamics’ humanoïde robot Atlas, die nu als een acrobaat rondrent, een aantal jaar geleden nog neer ging door een stukje hout.
Bronnen: ETH Zürich, New Atlas
Beeld: Bjelonic et al., 2020/ETH Zürich; Robotic Systems Lab/Youtube