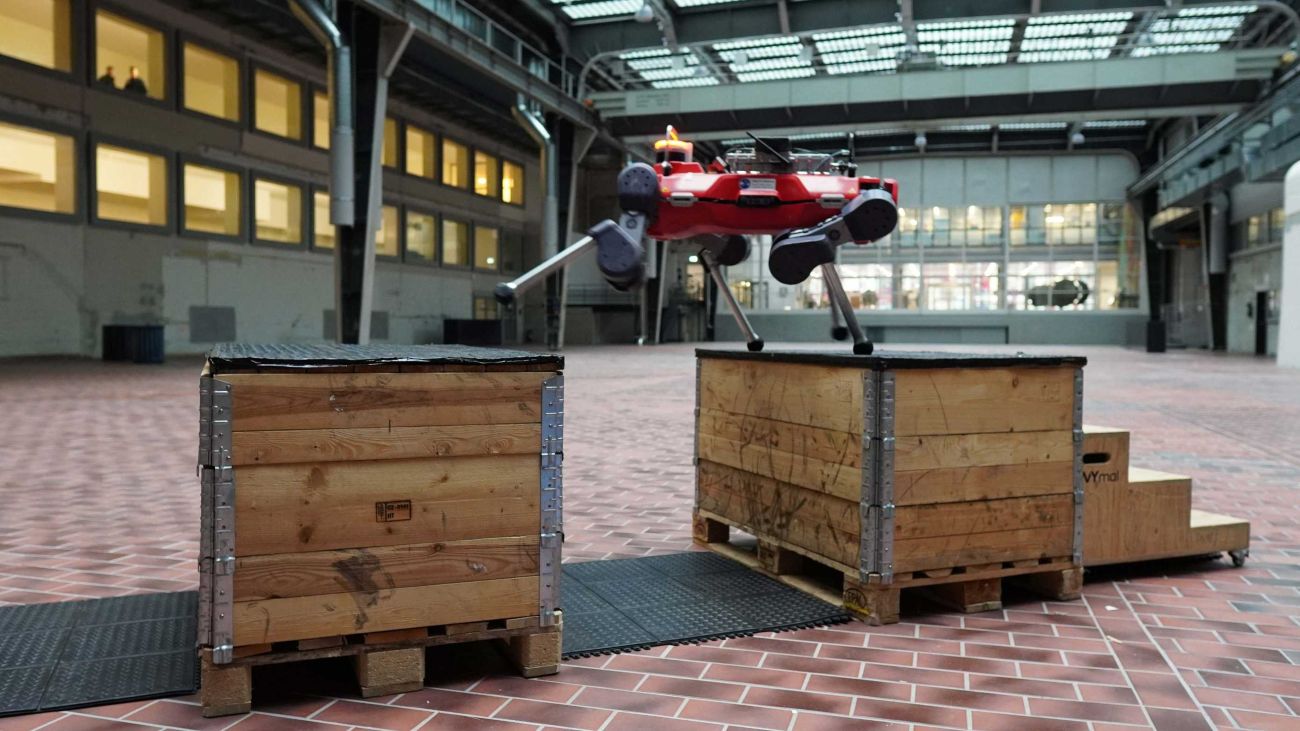

De hondachtige robot ANYmal heeft zichzelf nieuwe vaardigheden aangeleerd, zoals over obstakels klimmen en over gaten springen.
Waar de autonome viervoetige ANYmal in 2019 nog met haperende bewegingen en in laag tempo een trap beklom, kon hij in 2022 al een berg beklimmen via de rotsachtige Zwitserse wandelpaden en deed dat sneller dan de gemiddelde wandelaar. Nu klautert en springt de robot van het Robotic Systems Lab van ETH Zürich in rap tempo over hoge obstakels en loopt hij met gemak over een stapel instabiele rotsblokken (zie video onderaan dit artikel).
ANYmal is een opmerkelijke robot, hij kan op vier poten rondlopen of – als hij is uitgerust met wielen – rondrijden. Maar hij kan ook prima op zijn achterpoten staan om met zijn voorpoten voorwerpen op te tillen en deuren te openen.
De ontwikkelaars hopen dat hun robot onder andere ingezet kan worden voor opsporings- en reddingsmissies tijdens rampen. Daarvoor moet de viervoeter enorm behendig zijn en bijvoorbeeld over de resten van ingestorte gebouwen kunnen navigeren.
Lees ook:
Als een huisdier
En dat lijkt de viervoeter nu steeds beter te kunnen. Om ANYmal die ‘parkour-skills aan te leren maakte het team gebruik van machine learning. Daarvoor moest de robot heel vaak over obstakels klimmen om zo zelf uit te vogelen wat de beste manier is om dat te doen.
Dat proces ging via vallen en opstaan. Slaagde het op AI gebaseerde besturingssysteem erin om de robot succesvol langs een hindernis te navigeren, dan kreeg het een ‘beloning’ – vergelijkbaar met het trainen van een huisdier. Faalde het, dan leerde het hoe het de volgende keer niet moet. Zo wist het systeem na vele pogingen de beste manier om langs een obstakel te komen.
Als ANYmal nu in het echt een obstakel tegenkomt, voert hij bewegingen uit die op basis van zijn training de grootste slagingskans hebben.
Verbeterde balans
Het resultaat is dat de vierpotige robot nu kan klimmen, springen en kruipen om over of onder obstakels te manoeuvreren. Het team is er ook in geslaagd om de balans van ANYmal te verbeteren, waardoor hij overeind blijft op gladde en onstabiele ondergronden. Volgens het Robotic Systems Lab is de viervoeter daarom binnenkort klaar voor het echte werk: het inspecteren van gebieden die te gevaarlijk zijn voor mensen.
Bekijk hieronder hoe ANYmal over een hindernisbaan rent.
Bron: ETH Zürich
Beeld: ETH Zürich/Nikita Rudin