
Een studentenduo van de University of Michigan ontwikkelde SKOOTR: een supermobiele en superstabiele robot, geïnspireerd op de beweeglijke armen van slangsterren.
Waarom het wiel opnieuw uitvinden als moeder natuur het al heeft bedacht? Robotici passen dierlijke kenmerken al veelvuldig toe in het ontwerp van robots. Denk aan een robotarm gebaseerd op een olifantenslurf, of een grijper die inktvistentakels imiteert. Voor een studentenduo aan de University of Michigan dienden de armen van de beweeglijke zeeslangen als inspiratiebron. Samen met hun docent ontwikkelden zij SKOOTR. Skaten, rollen, lopen, en traplopen: allemaal geen probleem voor deze bionische robot.
Lees ook:
Beweeglijke slangsterren
Het meesterbrein achter SKOOTR is Talia Y. Moore, docent bij de University of Michigan. Moore is hier hoofd van het EMBiR-laboratorium (Evolutie en Beweging van Biologie en Robotica), waar ze robotconcepten baseert op biologische verschijnselen. En dat is precies hoe Moore op het idee van SKOOTR kwam.
Moore: “Ik zat op mijn bureaustoel en rolde door mijn kantoor langs groepjes studenten. De bureaustoel bewoog heel vlotjes elke kant op en ik gebruikte mijn benen om te sturen, terwijl ik stabiel op de stoel bleef zitten. Dat deed me denken aan slangsterren, een soort zeesterren, die tijdens het zwemmen heel gemakkelijk elke kant op keren.”
Vervolgens presenteerde Moore het prille idee aan haar studentengroep. Eén van hen, Adam Hung, greep de uitdaging met beide handen aan en begon de zomer van 2023 met uitwerken.
Bestaande robots met drie poten verliezen snel hun evenwicht wanneer ze een poot optillen om bijvoorbeeld een voorwerp op te pakken. Een vierde poot kan dit verhelpen, maar dat hindert de bewegingsvrijheid. Hungs oplossing: drie poten en een roterende bal als middelpunt. Een paar maanden later leverde hij – met wat softwarehulp van PhD-student Challen Enninful Adu – een compleet functionerende robot, genaamd SKOOTR.
Het ontwerp van SKOOTR
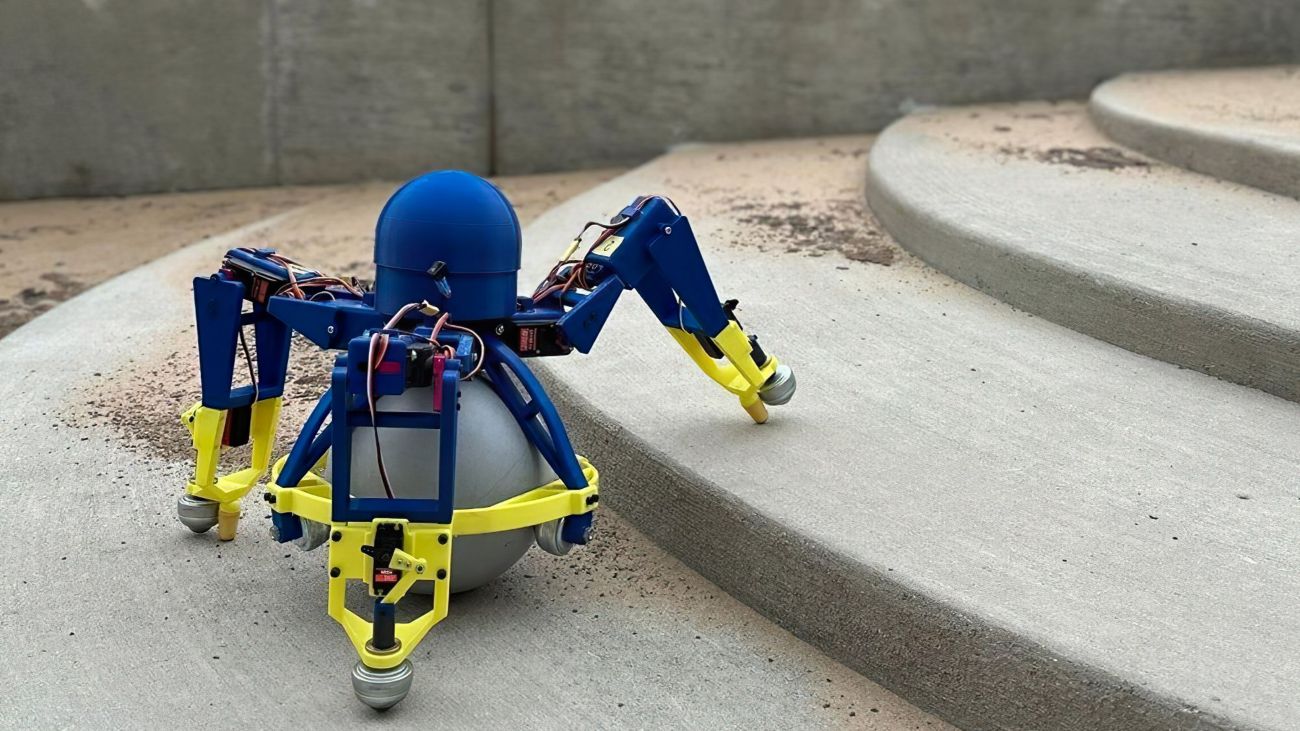
Skating, Omni-oriented, Tripedal Robot. Oftewel: een skatende, driepotige robot die alle kanten op kan keren. Hoewel de beweeglijkheid is geïnspireerd op slangsterren, heeft het uiterlijk van SKOOTR meer iets weg van een spin.
Het centrale punt is een bal, en hier overheen zit een soort roterend spinnenweb. Boven op het web zit de spinnenkop, die contact maakt met een extern besturingssysteem. Uit het web steken drie poten, met elk twee gewrichten. Het uiteinde van de poot beschikt over een balletje – om te rollen en glijden – en een uitschuifbaar rubberen steunpootje. Bij een gladde of scheve ondergrond schuif je het pootje uit als een soort elleboogkruk voor meer grip.
SKOOTR kan op de grond steunen met zijn drie poten, de centrale bal en het spinnenweb. Maar ze kunnen elkaar ook afwisselen. Welk onderdeel contact moet maken met de grond, of juist niet, regel je met een ‘servo’ – een los besturingsapparaat.
Ongeacht de situatie, SKOOTR weet zijn evenwicht te behouden. Wil je dat hij van een afdaling glijdt, dan laat je de bal zakken en trek je de rubberen steuntjes in. Zelfs traplopen – het grootste struikelblok voor bewegende robots – is geen issue: je trekt de bal in, en de rubberen pootjes werken om de beurt het robotje omhoog.
Toepassing in de praktijk
Op hun website deelt het EMBiR-team het ontwerp, iedereen kan er gratis bij. De meeste onderdelen zijn te 3D-printen, de rest is kant-en-klaar te bestellen. Alles bij elkaar kost SKOOTR slechts 500 dollar (460 euro).
En het originele ontwerp kun je ook aanpassen naar eigen behoefte. Zo kun je de centrale bal vervangen door een holle bol om voorwerpen in te bewaren en ergens af te leveren. Wil je de bewegingssnelheid verhogen, dan vervang je de bal door een lichtgewicht exemplaar.
Tijdens de lab-experimenten presteerde SKOOTR beter dan andere driepotige robots. “Het was onmogelijk om hem te laten omvallen, zo stabiel bleef hij”, laat Moore weten in een persbericht. Het team is dan ook trots op hun prestatie. De volgende stap is het toepassen in de praktijk en volgens het EMBiR-team ziet dat er rooskleurig uit.

Bronnen: TechXplore, NewAtlas, EMBiR-Lab
Openingsbeeld: University of Michigan/Hung, Adu and Moore